

 联系我们
联系我们

1. 开机前确认
1.1 5S清洁过的现场可能留有水渍,请检查控制器内外部和机器人本体是否干燥,避免造成短路。

1.2 上电前测定控制柜的输入电压是否正确。R-30iA、R-30iB、R-30iB PLUS 的A/B柜三相380V的输入电压,MATE控制柜则需要200V输入电压,波动范围-15%~10%。
1.3 机械本体底座,马达和控制器TP电缆接头是否紧固需仔细检查

1.4 如有气压组件,现场需确认
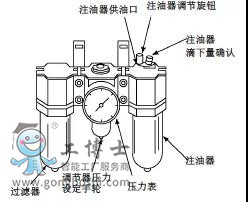
1.4.1 空气3点套件的情况
确认供应压力在0.49Mpa;
确认油雾量,启动气压系统检查滴下量为1滴/10~20秒;
检查空气3点套件的油量是否在规定液面内;
检查接头,软管等是否泄漏,有故障时,拧紧接头,或者更换部件。
1.4.2 气压组件的情况
确认供应压力处在10kpa;
确认露点检验器的颜色是否为蓝色。露点检验器的颜色发生变化时,应弄清原因并采取对策,同时更换干燥器。

2. 开机后确认
2.1 外围设备检查:确认控制面板及外部系统紧急停止、安全围栏、安全门等安全信号是否复位正常。
2.2 示教器界面中查看报警信息方法:

如不能进入机器人系统或机器人发生难以自行解决的重大故障报警时请联络工博士机器人服务热线:18621713899,本司会给予充分的技术支持。
2.3 长时间停机容易产生的问题:主板电池掉电无法进系统,本体电池掉电零位丢失。
主板电池掉电无法进系统
检查方法
查看示教器上是否显示SYST-035 Low or No Battery Power on MAIN 报警,如有需测量主板电池的电压,是否低于3V?无法进系统则观察主板的7段码是否显示“1”?
恢复方法
SYST-035报警可在开机状态下更换主板电池,更换电池的具体方法如下图:
如无法进系统需初始化系统操作,并导入之前做的一般备份或者镜像备份。若之前没有备份,可尝试导入FRA存储区的备份(这个是内存卡预留的一个断电可保持的存储区,用于存放机器人的自动备份)。

本体电池掉电零位丢失
检查方法
查看示教器上是否显示SRVO-065 BLAL alarm或 SRVO-062 BZAL alarm报警,如有需测量本体电池的电压,每节电池额定电压是1.5V,四节电池的总电压为6V
恢复方法
1)SRVO-065 BLAL alarm:开机更换本体底座处电池,位置如下图所示

2)SRVO-062 BZAL alarm:以上步骤更换电池后需参照说明书进行零点标定
3. 运行动作确认
3.1 需确认机器人是否在初始待机位置,以及至大工作范围,确保没有潜在干涉危险;
3.2 需确认现场其他设备所处的位置,有无移动可能,避免对机器人造成碰撞;
3.3 将控制柜的模式开关设置为T1低速档位模式,单步手动执行程序,确保点位正常;
3.4 手动运行完成后慢速自动执行生产程序,系统联动,确保没有发生碰撞和异常;
3.4 对于机器人现场温度较低,长时间的停机后再次开机运转时很可能会出现SRVO-050碰撞报警,建议先进行暖机运转,再进行高速运转。
了解更多有关机器人的请点击:发那科机器人专营店,
了解更多有关机器人的请点击:工业机器人工作站,带您走进机器人的世界!
